UA-MPC: Uncertainty-Aware Model Predictive Control for Motorized LiDAR Odometry
Jianping Li, Xinhang Xu, Jinxin Liu, Kun Cao, Shenghai Yuan, Lihua Xie
Nanyang Technological University, Tongji University
IEEE RAL 2025
Full Paper
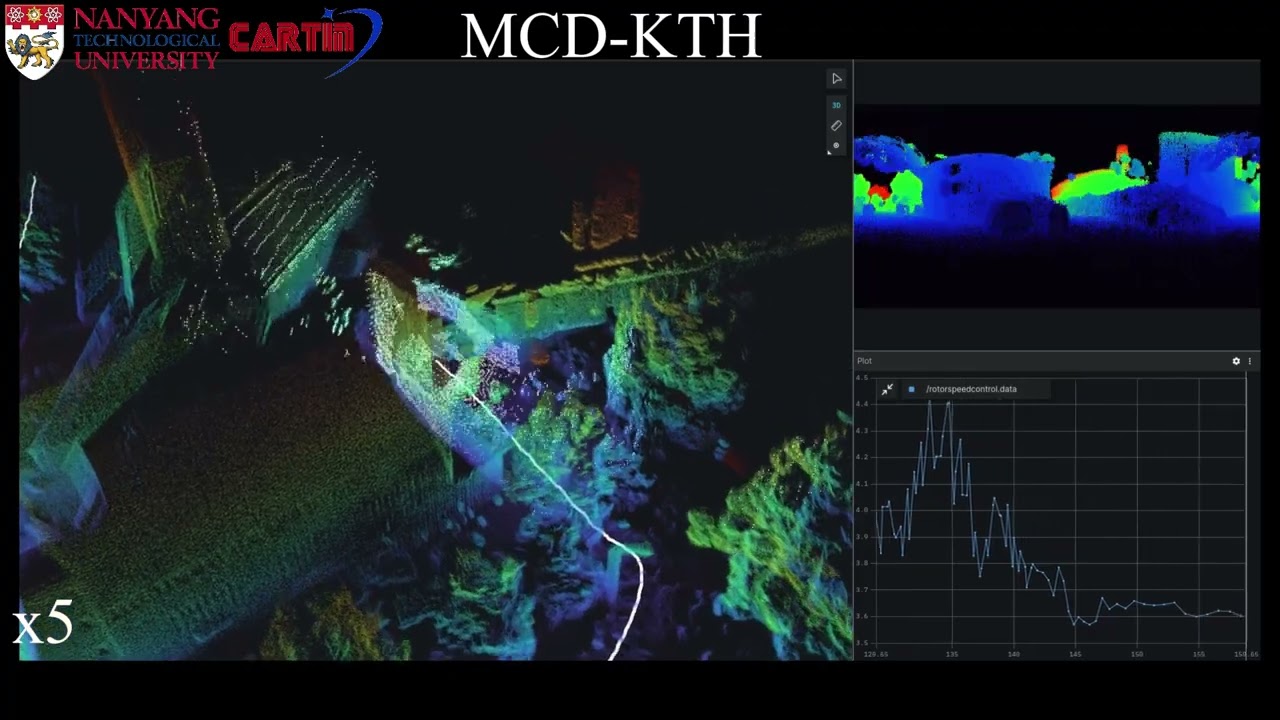
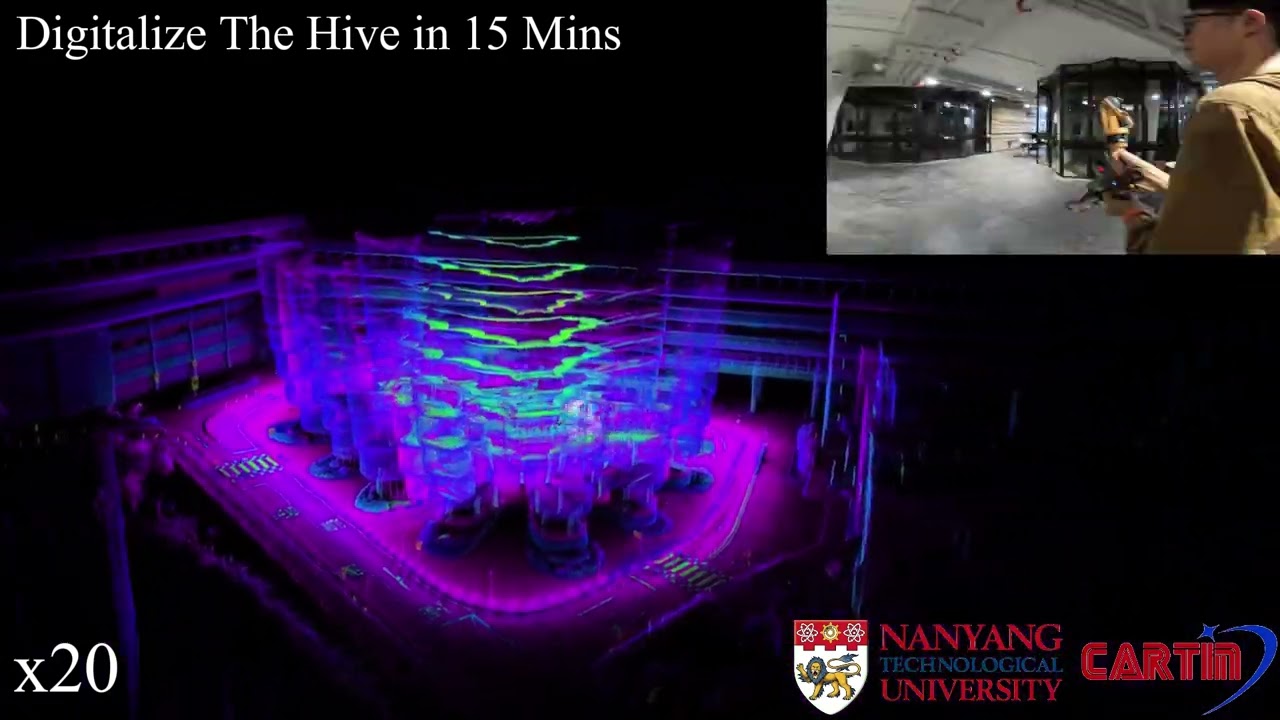
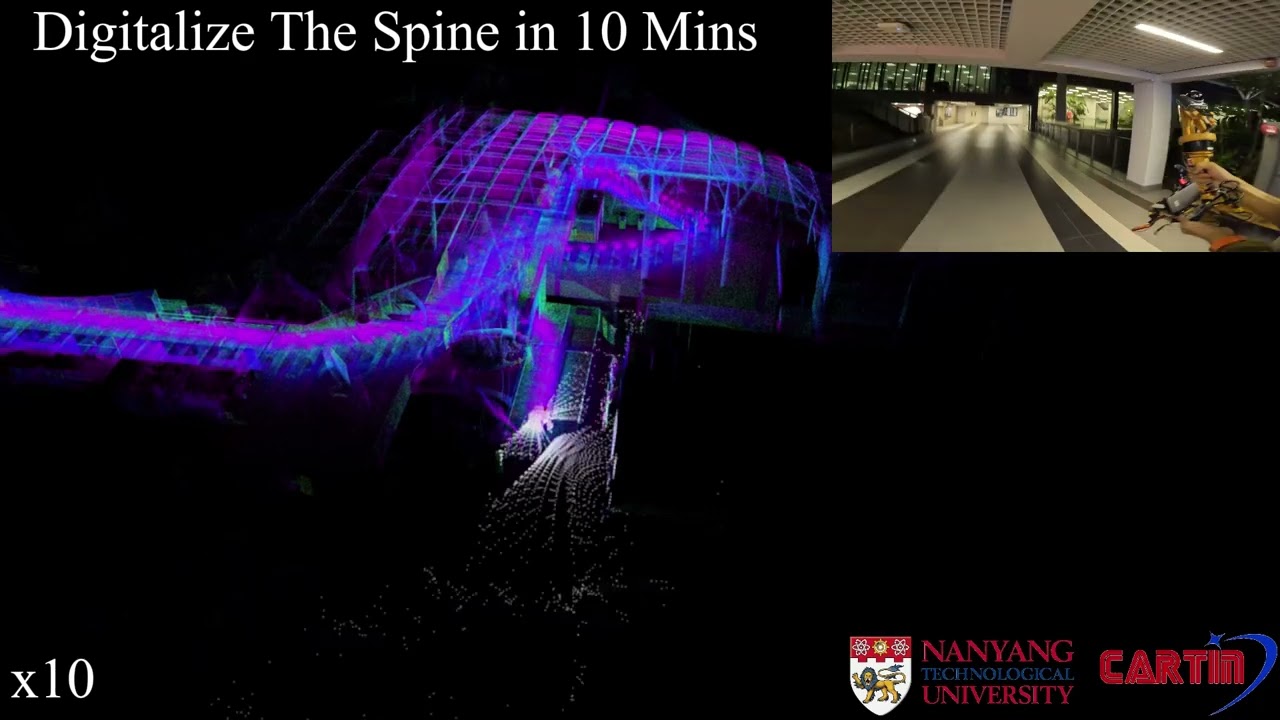
Motorized LiDAR systems can expand the Field of View (FoV) without adding multiple scanners, but existing motorized LiDAR systems often rely on constant-speed motor control, leading to suboptimal performance in complex environments. To address this, we propose UA-MPC, an uncertainty-aware motor control strategy that balances scanning accuracy and efficiency. Additionally, we develop a ROS-based realistic simulation environment for motorized LiDAR systems, enabling the evaluation of control strategies across diverse scenarios.
This work is build upon Marsim (https://github.com/hku-mars/MARSIM) and I2EKF (https://github.com/YWL0720/I2EKF-LO). We thank for the disscussion with Dr. Fanze Kong at HKU and Dr. Jie Xu at NTU.